
Lidar -Lidar




Lidar ( / l aɪ d ɑːr / , também LIDAR , ou LiDAR ; às vezes LADAR ) é um método para determinar intervalos (distância variável) visando um objeto com um laser e medindo o tempo para a luz refletida retornar ao receptor. O Lidar também pode ser usado para fazer representações digitais em 3-D de áreas na superfície da Terra e no fundo do oceano, devido a diferenças nos tempos de retorno do laser e pela variação dos comprimentos de onda do laser. Possui aplicativos terrestres, aéreos e móveis.
Lidar é um acrônimo de "detecção e alcance de luz" ou "imagem, detecção e alcance a laser". O Lidar às vezes é chamado de escaneamento a laser 3D , uma combinação especial de escaneamento 3D e escaneamento a laser .
Lidar é comumente usado para fazer mapas de alta resolução, com aplicações em topografia , geodésia , geomática , arqueologia , geografia , geologia , geomorfologia , sismologia , silvicultura , física atmosférica , orientação a laser, mapeamento de faixas de laser no ar (ALSM) e altimetria a laser . A tecnologia também é usada no controle e navegação de alguns carros autônomos e do helicóptero Ingenuity em seus voos recordes sobre o terreno de Marte .
História e etimologia
Sob a direção de Malcolm Stitch , a Hughes Aircraft Company introduziu o primeiro sistema do tipo lidar em 1961, logo após a invenção do laser. Destinado ao rastreamento por satélite, este sistema combinou imagens focadas em laser com a capacidade de calcular distâncias medindo o tempo para um sinal retornar usando sensores apropriados e eletrônica de aquisição de dados. Foi originalmente chamado de "Colidar" um acrônimo para "detecção e alcance de luz coerente", derivado do termo " radar ", em si um acrônimo para "detecção e alcance de rádio". Todos os telêmetros a laser, altímetros a laser e unidades lidar são derivados dos primeiros sistemas colidar. A primeira aplicação terrestre prática de um sistema colidar foi o "Colidar Mark II", um grande telêmetro a laser semelhante a um rifle produzido em 1963 que tinha um alcance de 7 milhas e uma precisão de 15 pés, para ser usado para alvos militares. A primeira menção de LIDAR como uma palavra independente em 1963 sugere que se originou como uma junção de " luz " e "radar": "Eventualmente, o laser pode fornecer um detector extremamente sensível de comprimentos de onda particulares de objetos distantes. Enquanto isso, está sendo usado para estudar a lua por 'lidar' (radar de luz) ..." O nome " radar fotônico " às vezes é usado para significar descoberta de alcance de espectro visível como lidar.
As primeiras aplicações do Lidar foram em meteorologia, para a qual o Centro Nacional de Pesquisa Atmosférica o usou para medir nuvens e poluição. O público em geral tomou conhecimento da precisão e utilidade dos sistemas LIDAR em 1971, durante a missão Apollo 15 , quando os astronautas usaram um altímetro a laser para mapear a superfície da lua. Embora a língua inglesa não trate mais "radar" como um acrônimo (ou seja, sem maiúscula), a palavra "lidar" foi capitalizada como "LIDAR" ou "LiDAR" em algumas publicações a partir da década de 1980. Não existe consenso sobre capitalização. Várias publicações referem-se a lidar como "LIDAR", "LiDAR", "LIDaR" ou "Lidar". O USGS usa "LIDAR" e "lidar", às vezes no mesmo documento; o New York Times usa predominantemente "lidar" para artigos escritos pela equipe, embora contribuições de feeds de notícias como a Reuters possam usar o Lidar.
Descrição geral
O Lidar usa luz ultravioleta , visível ou infravermelha próxima para criar imagens de objetos. Ele pode atingir uma ampla gama de materiais, incluindo objetos não metálicos, rochas, chuva, compostos químicos, aerossóis , nuvens e até moléculas únicas . Um feixe de laser estreito pode mapear características físicas com resoluções muito altas ; por exemplo, uma aeronave pode mapear o terreno com resolução de 30 centímetros (12 polegadas) ou melhor.


O conceito essencial de lidar foi originado por EH Synge em 1930, que previu o uso de poderosos holofotes para sondar a atmosfera. De fato, o lidar desde então tem sido amplamente usado para pesquisa atmosférica e meteorologia . Instrumentos Lidar instalados em aeronaves e satélites realizam levantamento e mapeamento – um exemplo recente é o Lidar de Pesquisa Aerotransportada Experimental Avançada do Serviço Geológico dos EUA. A NASA identificou o lidar como uma tecnologia chave para permitir o pouso seguro e autônomo de precisão de futuros veículos robóticos e tripulados de pouso lunar.
Os comprimentos de onda variam de acordo com o alvo: de cerca de 10 micrômetros ( infravermelho ) a aproximadamente 250 nm ( UV ). Normalmente, a luz é refletida por retroespalhamento , em oposição à reflexão pura que se pode encontrar com um espelho. Diferentes tipos de espalhamento são usados para diferentes aplicações lidar: mais comumente espalhamento Rayleigh , espalhamento Mie , espalhamento Raman e fluorescência . Combinações adequadas de comprimentos de onda podem permitir o mapeamento remoto de conteúdos atmosféricos identificando mudanças dependentes do comprimento de onda na intensidade do sinal retornado. O nome "radar fotônico" às vezes é usado para significar a descoberta de alcance de espectro visível como o LIDAR, embora o radar fotônico se refira mais estritamente à descoberta de alcance de radiofrequência usando componentes fotônicos .
Tecnologia
Projeto

Os dois tipos de esquemas de detecção de LIDAR são detecção de energia "incoerente" ou direta (que mede principalmente mudanças de amplitude da luz refletida) e detecção coerente (melhor para medir deslocamentos Doppler ou mudanças na fase da luz refletida). Os sistemas coerentes geralmente usam detecção óptica heteródino . Isso é mais sensível do que a detecção direta e permite que eles operem com potência muito menor, mas requer transceptores mais complexos.
Ambos os tipos empregam modelos de pulso: micropulso ou de alta energia . Os sistemas Micropulse utilizam rajadas intermitentes de energia. Eles se desenvolveram como resultado do poder computacional cada vez maior, combinado com os avanços na tecnologia do laser. Eles usam consideravelmente menos energia no laser, geralmente na ordem de um microjoule , e geralmente são "seguros para os olhos", o que significa que podem ser usados sem precauções de segurança. Sistemas de alta potência são comuns em pesquisas atmosféricas, onde são amplamente utilizados para medir parâmetros atmosféricos: a altura, camadas e densidades de nuvens, propriedades de partículas de nuvens ( coeficiente de extinção, coeficiente de retroespalhamento, despolarização ), temperatura, pressão, vento, umidade, e concentração de gases traços (ozônio, metano, óxido nitroso, etc.).
Componentes
Os sistemas Lidar consistem em vários componentes principais.
Laser
Lasers de 600–1000 nm são mais comuns para aplicações não científicas. A potência máxima do laser é limitada, ou um sistema de desligamento automático que desliga o laser em altitudes específicas é usado para torná-lo seguro para os olhos das pessoas no solo.
Uma alternativa comum, os lasers de 1550 nm, são seguros para os olhos em níveis de potência relativamente altos, pois esse comprimento de onda não é fortemente absorvido pelo olho, mas a tecnologia do detector é menos avançada e, portanto, esses comprimentos de onda geralmente são usados em intervalos mais longos com menor precisão. Eles também são usados para aplicações militares porque 1550 nm não é visível em óculos de visão noturna , ao contrário do laser infravermelho mais curto de 1000 nm.
Os lidars de mapeamento topográfico aerotransportado geralmente usam lasers YAG bombeados por diodo de 1064 nm , enquanto os sistemas batimétricos (pesquisa de profundidade subaquática) geralmente usam lasers YAG bombeados por diodo de frequência dupla de 532 nm porque 532 nm penetra na água com muito menos atenuação do que 1064 nm. As configurações do laser incluem a taxa de repetição do laser (que controla a velocidade de coleta de dados). O comprimento do pulso é geralmente um atributo do comprimento da cavidade do laser, o número de passagens necessárias através do material de ganho (YAG, YLF , etc.) e a velocidade do Q-switch (pulsação). A melhor resolução do alvo é alcançada com pulsos mais curtos, desde que os detectores e eletrônicos do receptor lidar tenham largura de banda suficiente.
Matrizes em fases
Um phased array pode iluminar qualquer direção usando um array microscópico de antenas individuais. Controlar o tempo (fase) de cada antena direciona um sinal coeso em uma direção específica.
Phased arrays têm sido usados em radares desde a década de 1940. A mesma técnica pode ser usada com luz. Na ordem de um milhão de antenas ópticas são usadas para ver um padrão de radiação de um determinado tamanho em uma determinada direção. O sistema é controlado cronometrando o flash preciso. Um único chip (ou alguns) substitui um sistema eletromecânico de US$ 75.000, reduzindo drasticamente os custos.
Várias empresas estão trabalhando no desenvolvimento de unidades lidar de estado sólido comerciais, incluindo a empresa Quanergy , que está projetando um dispositivo de estado sólido de 905 nm, embora pareça estar tendo alguns problemas no desenvolvimento.
O sistema de controle pode alterar a forma da lente para habilitar as funções de zoom in/zoom out. Subzonas específicas podem ser direcionadas em intervalos de subsegundos.
O lidar eletromecânico dura entre 1.000 e 2.000 horas. Por outro lado, o lidar de estado sólido pode funcionar por 100.000 horas.
Máquinas microeletromecânicas
Os espelhos microeletromecânicos (MEMS) não são inteiramente de estado sólido. No entanto, seu formato minúsculo oferece muitos dos mesmos benefícios de custo. Um único laser é direcionado para um único espelho que pode ser reorientado para visualizar qualquer parte do campo alvo. O espelho gira rapidamente. No entanto, os sistemas MEMS geralmente operam em um único plano (da esquerda para a direita). Adicionar uma segunda dimensão geralmente requer um segundo espelho que se move para cima e para baixo. Alternativamente, outro laser pode atingir o mesmo espelho de outro ângulo. Os sistemas MEMS podem ser interrompidos por choque/vibração e podem exigir calibração repetida. O objetivo é criar um pequeno microchip para aumentar a inovação e os avanços tecnológicos.
Scanner e óptica
A velocidade de desenvolvimento de imagens é afetada pela velocidade com que são digitalizadas. As opções para escanear o azimute e a elevação incluem espelhos planos oscilantes duplos, uma combinação com um espelho poligonal e um scanner de eixo duplo . As escolhas ópticas afetam a resolução angular e o alcance que podem ser detectados. Um espelho de orifício ou um divisor de feixe são opções para coletar um sinal de retorno.
Eletrônica do fotodetector e do receptor
Duas tecnologias principais de fotodetectores são usadas no lidar: fotodetectores de estado sólido , como fotodiodos de avalanche de silício ou fotomultiplicadores . A sensibilidade do receptor é outro parâmetro que deve ser balanceado em um projeto lidar.
Os sensores Lidar montados em plataformas móveis, como aviões ou satélites, requerem instrumentação para determinar a posição absoluta e a orientação do sensor. Tais dispositivos geralmente incluem um receptor do Sistema de Posicionamento Global e uma unidade de medição inercial (IMU).
Sensor
O Lidar utiliza sensores ativos que fornecem sua própria fonte de iluminação. A fonte de energia atinge objetos e a energia refletida é detectada e medida por sensores. A distância até o objeto é determinada registrando o tempo entre os pulsos transmitidos e retroespalhados e usando a velocidade da luz para calcular a distância percorrida. O Flash LIDAR permite imagens 3-D devido à capacidade da câmera de emitir um flash maior e detectar as relações espaciais e as dimensões da área de interesse com a energia retornada. Isso permite imagens mais precisas porque os quadros capturados não precisam ser costurados e o sistema não é sensível ao movimento da plataforma. Isso resulta em menos distorção.
A imagem 3-D pode ser obtida usando sistemas de digitalização e não digitalização. O "radar a laser de visualização fechada 3-D" é um sistema de alcance a laser sem varredura que aplica um laser pulsado e uma câmera fechada rápida. A pesquisa começou para direcionamento de feixe virtual usando a tecnologia Digital Light Processing (DLP).
A geração de imagens lidar também pode ser realizada usando matrizes de detectores de alta velocidade e matrizes de detectores sensíveis à modulação normalmente construídas em chips únicos usando técnicas de fabricação de semicondutores de metal-óxido-semicondutor (CMOS) e CMOS híbridos/ dispositivos acoplados a carga (CCD). Nesses dispositivos, cada pixel realiza algum processamento local, como demodulação ou gating em alta velocidade, convertendo os sinais em taxa de vídeo para que a matriz possa ser lida como uma câmera. Usando esta técnica muitos milhares de pixels/canais podem ser adquiridos simultaneamente. As câmeras lidar 3-D de alta resolução usam detecção homódina com um obturador eletrônico CCD ou CMOS .
Um LIDAR de imagem coerente usa detecção heteródino de matriz sintética para permitir que um receptor de elemento único aja como se fosse uma matriz de imagem.
Em 2014, o Lincoln Laboratory anunciou um novo chip de imagem com mais de 16.384 pixels, cada um capaz de capturar imagens de um único fóton, permitindo capturar uma ampla área em uma única imagem. Uma geração anterior da tecnologia com um quarto do número de pixels foi despachada pelos militares dos EUA após o terremoto de janeiro de 2010 no Haiti. Uma única passagem por um jato executivo a 3.000 metros (10.000 pés) sobre Porto Príncipe foi capaz de capturar instantâneos de 600 metros quadrados da cidade com uma resolução de 30 centímetros (12 pol), exibindo a altura precisa de escombros espalhados pelas ruas da cidade. O novo sistema é dez vezes melhor e pode produzir mapas muito maiores mais rapidamente. O chip usa arseneto de índio e gálio (InGaAs), que opera no espectro infravermelho em um comprimento de onda relativamente longo que permite maior potência e alcances mais longos. Em muitas aplicações, como carros autônomos, o novo sistema reduzirá os custos por não exigir um componente mecânico para apontar o chip. O InGaAs usa comprimentos de onda menos perigosos do que os detectores de silício convencionais, que operam em comprimentos de onda visuais.
Flash Lidar
No flash lidar, todo o campo de visão é iluminado com um amplo feixe de laser divergente em um único pulso. Isso contrasta com o LIDAR de varredura convencional, que usa um feixe de laser colimado que ilumina um único ponto de cada vez, e o feixe é escaneado por varredura para iluminar o campo de visão ponto a ponto. Este método de iluminação também requer um esquema de detecção diferente. Tanto na varredura quanto no flash lidar, uma câmera de tempo de voo é usada para coletar informações sobre a localização 3-D e a intensidade da luz incidente sobre ela em cada quadro. No entanto, na varredura lidar, esta câmera contém apenas um sensor de ponto, enquanto no flash lidar, a câmera contém uma matriz de sensores 1-D ou 2-D , cada pixel coletando informações de localização e intensidade em 3-D. Em ambos os casos, as informações de profundidade são coletadas usando o tempo de voo do pulso de laser (ou seja, o tempo que cada pulso de laser leva para atingir o alvo e retornar ao sensor), o que requer a pulsação do laser e a aquisição pelo câmera a ser sincronizada. O resultado é uma câmera que tira fotos de distância, em vez de cores. O flash lidar é especialmente vantajoso, quando comparado ao escanear lidar, quando a câmera, cena ou ambos estão em movimento, pois toda a cena é iluminada ao mesmo tempo. Com a varredura lidar, o movimento pode causar "tremulação" do lapso de tempo à medida que o laser rasteriza a cena.
Tal como acontece com todas as formas de lidar, a fonte de iluminação a bordo torna o flash lidar um sensor ativo. O sinal que é retornado é processado por algoritmos incorporados para produzir uma renderização 3-D quase instantânea de objetos e características do terreno dentro do campo de visão do sensor. A frequência de repetição do pulso do laser é suficiente para gerar vídeos 3D com alta resolução e precisão. A alta taxa de quadros do sensor o torna uma ferramenta útil para uma variedade de aplicações que se beneficiam da visualização em tempo real, como operações de pouso remoto altamente precisas. Ao retornar imediatamente uma malha de elevação 3D de paisagens alvo, um sensor de flash pode ser usado para identificar zonas de pouso ideais em cenários de pouso de espaçonaves autônomas.
Ver à distância requer uma poderosa explosão de luz. O poder é limitado a níveis que não danificam as retinas humanas. Os comprimentos de onda não devem afetar os olhos humanos. No entanto, os imageadores de silício de baixo custo não lêem a luz no espectro seguro para os olhos. Em vez disso, são necessários geradores de imagens de arseneto de gálio , o que pode aumentar os custos para US$ 200.000. O arseneto de gálio é o mesmo composto usado para produzir painéis solares de alto custo e alta eficiência geralmente usados em aplicações espaciais
Classificação
Com base na orientação
Lidar pode ser orientado para nadir , zênite ou lateralmente. Por exemplo, os altímetros lidar olham para baixo, um lidar atmosférico olha para cima e os sistemas de prevenção de colisões baseados em lidar são voltados para o lado.
Com base no mecanismo de digitalização
As projeções a laser de lidars podem ser manipuladas usando vários métodos e mecanismos para produzir um efeito de varredura: o tipo fuso padrão, que gira para dar uma visão de 360 graus; LIDAR de estado sólido, que tem um campo de visão fixo, mas sem partes móveis, e pode usar MEMS ou matrizes de fase óptica para direcionar os feixes; e flash lidar, que espalha um flash de luz sobre um grande campo de visão antes que o sinal retorne para um detector.
Baseado na plataforma
As aplicações do Lidar podem ser divididas em tipos aéreos e terrestres. Os dois tipos exigem scanners com especificações variadas com base na finalidade dos dados, no tamanho da área a ser capturada, na faixa de medição desejada, no custo do equipamento e muito mais. Plataformas espaciais também são possíveis, veja altimetria laser de satélite .
Aerotransportado
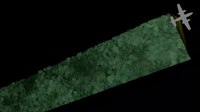
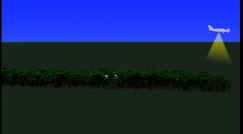
O lidar aéreo (também varredura a laser no ar ) é quando um scanner a laser, enquanto conectado a uma aeronave durante o vôo, cria um modelo de nuvem de pontos 3D da paisagem. Este é atualmente o método mais detalhado e preciso de criação de modelos digitais de elevação , substituindo a fotogrametria . Uma grande vantagem em comparação com a fotogrametria é a capacidade de filtrar os reflexos da vegetação do modelo de nuvem de pontos para criar um modelo de terreno digital que representa superfícies do solo, como rios, caminhos, locais de patrimônio cultural, etc., que estão ocultos por árvores. Dentro da categoria de lidar aéreo, às vezes há uma distinção entre aplicativos de alta e baixa altitude, mas a principal diferença é uma redução na precisão e na densidade de pontos dos dados adquiridos em altitudes mais altas. O lidar aéreo também pode ser usado para criar modelos batimétricos em águas rasas.
Os principais componentes do lidar aerotransportado incluem modelos digitais de elevação (DEM) e modelos digitais de superfície (DSM). Os pontos e pontos de terra são os vetores de pontos discretos enquanto DEM e DSM são grades raster interpoladas de pontos discretos. O processo também envolve a captura de fotografias aéreas digitais. Para interpretar deslizamentos de terra profundos, por exemplo, sob a cobertura de vegetação, escarpas, rachaduras de tensão ou árvores derrubadas, é usado o lidar aéreo. Os modelos de elevação digital lidar aerotransportados podem ver através do dossel da cobertura florestal, realizar medições detalhadas de escarpas, erosão e inclinação de postes elétricos.
Os dados do lidar aéreos são processados usando uma caixa de ferramentas chamada Toolbox for Lidar Data Filtering and Forest Studies (TIFFS) para filtragem de dados lidar e software de estudo de terreno. Os dados são interpolados para modelos digitais de terreno usando o software. O laser é direcionado para a região a ser mapeada e a altura de cada ponto acima do solo é calculada subtraindo a coordenada z original da elevação do modelo digital de terreno correspondente. Com base nesta altura acima do solo são obtidos os dados de não vegetação que podem incluir objetos como prédios, linhas de energia elétrica, pássaros voadores, insetos, etc. Os demais pontos são tratados como vegetação e usados para modelagem e mapeamento. Dentro de cada um desses gráficos, as métricas lidar são calculadas calculando estatísticas como média, desvio padrão, assimetria, percentis, média quadrática, etc.

Batimetria Lidar Aerotransportada
O sistema tecnológico batimétrico aerotransportado lidar envolve a medição do tempo de voo de um sinal de uma fonte até seu retorno ao sensor. A técnica de aquisição de dados envolve um componente de mapeamento do fundo do mar e um componente de verdade do solo que inclui transects de vídeo e amostragem. Ele funciona usando um feixe de laser de espectro verde (532 nm). Dois feixes são projetados em um espelho giratório rápido, que cria uma série de pontos. Um dos feixes penetra na água e também detecta a superfície inferior da água em condições favoráveis.
Os dados obtidos mostram toda a extensão da superfície terrestre exposta acima do fundo do mar. Esta técnica é extremamente útil, pois desempenhará um papel importante no principal programa de mapeamento do fundo do mar. O mapeamento produz topografia onshore, bem como elevações submarinas. A imagem de refletância do fundo do mar é outro produto de solução deste sistema que pode beneficiar o mapeamento de habitats subaquáticos. Esta técnica tem sido usada para mapeamento de imagens tridimensionais das águas da Califórnia usando um lidar hidrográfico.

Drones agora estão sendo usados com scanners a laser, bem como outros sensores remotos, como um método mais econômico para escanear áreas menores. A possibilidade de sensoriamento remoto por drone também elimina qualquer perigo que as tripulações de uma aeronave tripulada possam estar sujeitas em terrenos difíceis ou áreas remotas.
Terrestre
As aplicações terrestres do lidar (também varredura a laser terrestre ) acontecem na superfície da Terra e podem ser estacionárias ou móveis. A varredura terrestre estacionária é mais comum como método de pesquisa, por exemplo, em topografia convencional, monitoramento, documentação de patrimônio cultural e forense. As nuvens de pontos 3D adquiridas desses tipos de scanners podem ser combinadas com imagens digitais tiradas da área digitalizada do local do scanner para criar modelos 3D realistas em um tempo relativamente curto quando comparado a outras tecnologias. Cada ponto na nuvem de pontos recebe a cor do pixel da imagem tirada no mesmo local e direção do feixe de laser que criou o ponto.
O lidar móvel (também varredura a laser móvel ) é quando dois ou mais scanners são conectados a um veículo em movimento para coletar dados ao longo de um caminho. Esses scanners quase sempre são emparelhados com outros tipos de equipamentos, incluindo receptores GNSS e IMUs . Um exemplo de aplicação é o levantamento de ruas, onde linhas de energia, alturas exatas de pontes, árvores limítrofes, etc., tudo isso precisa ser levado em consideração. Em vez de coletar cada uma dessas medições individualmente em campo com um taquímetro , pode-se criar um modelo 3D a partir de uma nuvem de pontos onde todas as medições necessárias podem ser feitas, dependendo da qualidade dos dados coletados. Isso elimina o problema de esquecer de fazer uma medição, desde que o modelo esteja disponível, seja confiável e tenha um nível de precisão adequado.
O mapeamento do lidar terrestre envolve um processo de geração de mapas de grade de ocupação . O processo envolve uma matriz de células divididas em grades que empregam um processo para armazenar os valores de altura quando os dados do lidar caem na respectiva célula da grade. Um mapa binário é então criado aplicando um limite específico aos valores da célula para processamento adicional. O próximo passo é processar a distância radial e as coordenadas z de cada varredura para identificar quais pontos 3-D correspondem a cada uma das células da grade especificadas que levam ao processo de formação de dados.
LiDAR de forma de onda completa
Os sistemas Airborne LiDAR eram tradicionalmente capazes de adquirir apenas alguns retornos de pico, enquanto os sistemas mais recentes adquirem e digitalizam todo o sinal refletido. Os cientistas analisaram o sinal da forma de onda para extrair retornos de pico usando a Decomposição Gaussiana. Zhuang et al, 2017 usaram essa abordagem para estimar a biomassa acima do solo. Manipular as enormes quantidades de dados de forma de onda completa é difícil. Portanto, a Decomposição Gaussiana das formas de onda é eficaz, pois reduz os dados e é suportada por fluxos de trabalho existentes que suportam a interpretação de nuvens de pontos 3D. Estudos recentes investigaram a voxelização. As intensidades das amostras de forma de onda são inseridas em um espaço voxelizado (ou seja, imagem 3D em tons de cinza) construindo uma representação 3D da área digitalizada. Métricas e informações relacionadas podem ser extraídas desse espaço voxelizado. Informações estruturais podem ser extraídas usando métricas 3D de áreas locais e há um estudo de caso que usou a abordagem de voxelização para detectar árvores mortas de eucalipto na Austrália.
Formulários

Há uma grande variedade de aplicativos lidar, além dos aplicativos listados abaixo, como é frequentemente mencionado nos programas de conjuntos de dados National lidar . Esses aplicativos são amplamente determinados pela faixa de detecção efetiva de objetos; resolução, que é a precisão com que o lidar identifica e classifica objetos; e confusão de refletância, significando quão bem o lidar pode ver algo na presença de objetos brilhantes, como sinais refletivos ou sol brilhante.
As empresas estão trabalhando para reduzir o custo dos sensores lidar, atualmente de cerca de US$ 1.200 a mais de US$ 12.000. Preços mais baixos tornarão o lidar mais atraente para novos mercados.
Agricultura

Robôs agrícolas têm sido usados para uma variedade de propósitos, desde dispersões de sementes e fertilizantes, técnicas de detecção, bem como reconhecimento de culturas para a tarefa de controle de ervas daninhas.
Lidar pode ajudar a determinar onde aplicar fertilizantes caros. Pode criar um mapa topográfico dos campos e revelar as encostas e a exposição solar dos terrenos agrícolas. Pesquisadores do Serviço de Pesquisa Agrícola usaram esses dados topográficos com os resultados de rendimento de terras agrícolas de anos anteriores, para categorizar a terra em zonas de alto, médio ou baixo rendimento. Isso indica onde aplicar fertilizante para maximizar o rendimento.
Lidar agora é usado para monitorar insetos no campo. O uso do Lidar pode detectar o movimento e o comportamento de insetos voadores individuais, com identificação até sexo e espécie. Em 2017 foi publicado um pedido de patente sobre esta tecnologia nos Estados Unidos da América, Europa e China.
Outra aplicação é o mapeamento de culturas em pomares e vinhedos, para detectar o crescimento da folhagem e a necessidade de podas ou outras manutenções, detectar variações na produção de frutas ou contar plantas.
O Lidar é útil em situações sem GNSS , como pomares de nozes e frutas, onde a folhagem bloqueia os sinais de satélite para equipamentos de agricultura de precisão ou um trator autônomo . Os sensores Lidar podem detectar as bordas das linhas, para que os equipamentos agrícolas possam continuar se movendo até que o sinal GNSS seja restabelecido.
Classificação de espécies de plantas
O controle de ervas daninhas requer a identificação de espécies de plantas. Isso pode ser feito usando lidar 3-D e aprendizado de máquina. Lidar produz contornos de plantas como uma "nuvem de pontos" com valores de alcance e refletância. Esses dados são transformados e os recursos são extraídos deles. Se a espécie for conhecida, as feições são adicionadas como novos dados. A espécie é rotulada e suas características são inicialmente armazenadas como exemplo para identificação da espécie no ambiente real. Esse método é eficiente porque usa um lidar de baixa resolução e aprendizado supervisionado. Ele inclui um conjunto de recursos fácil de calcular com recursos estatísticos comuns que são independentes do tamanho da planta.
Arqueologia
Lidar tem muitos usos em arqueologia, incluindo planejamento de campanhas de campo, mapeamento de recursos sob o dossel da floresta e visão geral de recursos amplos e contínuos indistinguíveis do solo. A Lidar pode produzir conjuntos de dados de alta resolução de forma rápida e barata. Os produtos derivados do Lidar podem ser facilmente integrados a um Sistema de Informações Geográficas (GIS) para análise e interpretação.
O Lidar também pode ajudar a criar modelos digitais de elevação (DEMs) de alta resolução de sítios arqueológicos que podem revelar microtopografias que, de outra forma, estão escondidas pela vegetação. A intensidade do sinal LIDAR retornado pode ser usada para detectar recursos enterrados sob superfícies planas com vegetação, como campos, especialmente ao mapear usando o espectro infravermelho. A presença dessas características afeta o crescimento das plantas e, portanto, a quantidade de luz infravermelha refletida de volta. Por exemplo, em Fort Beauséjour – Sítio Histórico Nacional de Fort Cumberland, Canadá, o lidar descobriu características arqueológicas relacionadas ao cerco do Forte em 1755. Características que não puderam ser distinguidas no solo ou por fotografia aérea foram identificadas pela sobreposição das sombras das colinas do DEM criado com iluminação artificial de vários ângulos. Outro exemplo é o trabalho na Caracol de Arlen Chase e sua esposa Diane Zaino Chase . Em 2012, o lidar foi usado para procurar a lendária cidade de La Ciudad Blanca ou "Cidade do Deus Macaco" na região de La Mosquitia da selva hondurenha. Durante um período de mapeamento de sete dias, foram encontradas evidências de estruturas feitas pelo homem. Em junho de 2013, foi anunciada a redescoberta da cidade de Mahendraparvata . No sul da Nova Inglaterra, o lidar foi usado para revelar paredes de pedra, fundações de edifícios, estradas abandonadas e outras características da paisagem obscurecidas na fotografia aérea pelo denso dossel florestal da região. No Camboja, os dados do lidar foram usados por Damian Evans e Roland Fletcher para revelar mudanças antropogênicas na paisagem de Angkor
Em 2012, Lidar revelou que o assentamento Purépecha de Angamuco em Michoacán , México, tinha tantos edifícios quanto a Manhattan de hoje; enquanto em 2016, seu uso no mapeamento de antigas calçadas maias no norte da Guatemala revelou 17 estradas elevadas que ligam a antiga cidade de El Mirador a outros locais. Em 2018, arqueólogos usando lidar descobriram mais de 60.000 estruturas feitas pelo homem na Reserva da Biosfera Maia , um "grande avanço" que mostrou que a civilização maia era muito maior do que se pensava anteriormente.
Veículos autônomos


Veículos autônomos podem usar o lidar para detecção e prevenção de obstáculos para navegar com segurança pelos ambientes. A introdução do lidar foi uma ocorrência crucial que foi o principal facilitador por trás do Stanley , o primeiro veículo autônomo a completar com sucesso o DARPA Grand Challenge . A saída da nuvem de pontos do sensor lidar fornece os dados necessários para que o software do robô determine onde existem obstáculos em potencial no ambiente e onde o robô está em relação a esses obstáculos em potencial. A Singapore-MIT Alliance for Research and Technology (SMART) de Cingapura está desenvolvendo ativamente tecnologias para veículos autônomos lidar.
As primeiras gerações de sistemas de controle de cruzeiro adaptativos automotivos usavam apenas sensores lidar.
Detecção de objetos para sistemas de transporte
Em sistemas de transporte, para garantir a segurança de veículos e passageiros e desenvolver sistemas eletrônicos que forneçam assistência ao motorista, é essencial entender o veículo e seu ambiente circundante. Os sistemas Lidar desempenham um papel importante na segurança dos sistemas de transporte. Muitos sistemas eletrônicos que contribuem para a assistência ao motorista e a segurança do veículo, como o Adaptive Cruise Control (ACC), o Emergency Brake Assist e o Anti-lock Braking System (ABS), dependem da detecção do ambiente de um veículo para agir de forma autônoma ou semi-autônoma. O mapeamento e a estimativa Lidar alcançam isso.
Visão geral do básico: Os sistemas lidar atuais usam espelhos hexagonais rotativos que dividem o feixe de laser. Os três feixes superiores são usados para veículos e obstáculos à frente e os feixes inferiores são usados para detectar marcações de pista e características da estrada. A grande vantagem de usar o lidar é que a estrutura espacial é obtida e esses dados podem ser fundidos com outros sensores como radar , etc. para obter uma melhor imagem do ambiente do veículo em termos de propriedades estáticas e dinâmicas dos objetos presentes no ambiente. Por outro lado, um problema significativo com o lidar é a dificuldade em reconstruir dados de nuvens de pontos em condições climáticas ruins. Em chuva forte, por exemplo, os pulsos de luz emitidos pelo sistema LIDAR são parcialmente refletidos nas gotas de chuva que adicionam ruído aos dados, chamados de 'ecos'.
Abaixo mencionadas são várias abordagens de processamento de dados lidar e usá-los junto com dados de outros sensores por meio da fusão de sensores para detectar as condições do ambiente do veículo.
Processamento baseado em GRID usando lidar 3-D e fusão com medição de radar
Neste método, proposto por Philipp Lindner e Gerd Wanielik, os dados do laser são processados usando uma grade de ocupação multidimensional. Os dados de um laser de quatro camadas são pré-processados no nível do sinal e depois processados em um nível superior para extrair as características dos obstáculos. Uma combinação de estrutura de grade de duas e três dimensões é usada e o espaço nessas estruturas é tesselado em várias células discretas. Este método permite que uma grande quantidade de dados brutos de medição sejam tratados de forma eficaz, coletando-os em contêineres espaciais, as células da grade de evidências. Cada célula está associada a uma medida de probabilidade que identifica a ocupação da célula. Essa probabilidade é calculada usando a medição de alcance do sensor LIDAR obtida ao longo do tempo e uma nova medição de alcance, que são relacionadas usando o teorema de Bayes . Uma grade bidimensional pode observar um obstáculo à sua frente, mas não pode observar o espaço atrás do obstáculo. Para resolver isso, o estado desconhecido por trás do obstáculo recebe uma probabilidade de 0,5. Ao introduzir a terceira dimensão ou, em outros termos, usando um laser multicamadas, a configuração espacial de um objeto pode ser mapeada na estrutura da grade com um grau de complexidade. Isso é obtido transferindo os pontos de medição para uma grade tridimensional. As células da grade que estão ocupadas terão uma probabilidade maior que 0,5 e o mapeamento será codificado por cores com base na probabilidade. As células que não estiverem ocupadas terão uma probabilidade menor que 0,5 e essa área geralmente será um espaço em branco. Esta medição é então transformada em um sistema de coordenadas de grade usando a posição do sensor no veículo e a posição do veículo no sistema de coordenadas mundial. As coordenadas do sensor dependem de sua localização no veículo e as coordenadas do veículo são calculadas usando a estimativa de egomotion , que é estimar o movimento do veículo em relação a uma cena rígida. Para este método, o perfil da grade deve ser definido. As células da grade tocadas pelo feixe de laser transmitido são calculadas aplicando o algoritmo de linha de Bresenham . Para obter a estrutura espacialmente estendida, é realizada uma análise de componentes conectados dessas células. Esta informação é então passada para um algoritmo de calibre rotativo para obter as características espaciais do objeto. Além da detecção lidar, os dados RADAR obtidos usando dois radares de curto alcance são integrados para obter propriedades dinâmicas adicionais do objeto, como sua velocidade. As medições são atribuídas ao objeto usando uma função de distância potencial.
- Vantagens e desvantagens
As características geométricas dos objetos são extraídas de forma eficiente, a partir das medidas obtidas pela grade de ocupação 3-D, usando o algoritmo de paquímetro rotativo. A fusão dos dados do radar com as medições do LIDAR fornece informações sobre as propriedades dinâmicas do obstáculo, como velocidade e localização do obstáculo para a localização do sensor, o que ajuda o veículo ou o motorista a decidir a ação a ser executada para garantir a segurança. A única preocupação é o requisito computacional para implementar esta técnica de processamento de dados. Ele pode ser implementado em tempo real e tem se mostrado eficiente se o tamanho da grade de ocupação 3-D for consideravelmente restrito. Mas isso pode ser melhorado para um alcance ainda maior usando estruturas de dados espaciais dedicadas que manipulam os dados espaciais de forma mais eficaz, para a representação em grade 3D.
Fusão de 3-D lidar e câmera colorida para detecção e rastreamento de vários objetos
O framework proposto neste método por Soonmin Hwang et al., é dividido em quatro etapas. Primeiro, os dados da câmera e do lidar 3-D são inseridos no sistema. Ambas as entradas do lidar e da câmera são obtidas paralelamente e a imagem colorida da câmera é calibrada com o lidar. Para melhorar a eficiência, a amostragem de ponto 3-D horizontal é aplicada como pré-processamento. Segundo, o estágio de segmentação é onde todos os pontos 3-D são divididos em vários grupos por distância do sensor e os planos locais do plano próximo ao plano distante são estimados sequencialmente. Os planos locais são estimados usando análise estatística. O grupo de pontos mais próximos do sensor é usado para calcular o plano inicial. Usando o plano local atual, o próximo plano local é estimado por uma atualização iterativa. As propostas de objetos na imagem 2-D são usadas para separar os objetos do primeiro plano do plano de fundo. Para detecção e rastreamento mais rápidos e precisos, são usados gradientes normados binarizados (BING) para estimativa de objetividade a 300 fps. O BING é uma combinação de gradiente normalizado e sua versão binarizada que acelera o processo de extração e teste de recursos, para estimar a objetividade de uma janela de imagem. Desta forma, os objetos em primeiro plano e em segundo plano são separados. Para formar objetos após estimar a objetividade de uma imagem usando o BING, os pontos 3-D são agrupados ou agrupados. O clustering é feito usando o algoritmo DBSCAN (Density-Based Spatial Clustering of Applications with Noise) que pode ser robusto devido à sua característica menos paramétrica. Usando os pontos 3-D agrupados, ou seja, o segmento 3-D, regiões de interesse (RoIs) mais precisas são geradas pela projeção de pontos 3-D na imagem 2-D. A terceira etapa é a detecção, que é dividida em duas partes. O primeiro é a detecção de objetos em imagem 2-D que é obtida usando Fast R-CNN, pois esse método não precisa de treinamento e também considera uma imagem e várias regiões de interesse. A segunda é a detecção de objetos no espaço 3-D que é feita usando o método de imagem giratória. Este método extrai histogramas locais e globais para representar um determinado objeto. Para mesclar os resultados da detecção da imagem 2-D e do objeto espacial 3-D, a mesma região 3-D é considerada e dois classificadores independentes da imagem 2-D e do espaço 3-D são aplicados à região considerada. A calibração das pontuações é feita para obter uma única pontuação de confiança de ambos os detectores. Essa pontuação única é obtida na forma de probabilidade. A etapa final é o rastreamento. Isso é feito associando objetos em movimento no quadro atual e passado. Para rastreamento de objetos, a correspondência de segmentos é adotada. Características como média, desvio padrão, histogramas de cores quantizadas, tamanho do volume e número de pontos 3-D de um segmento são computados. A distância euclidiana é usada para medir diferenças entre segmentos. Para julgar o aparecimento e desaparecimento de um objeto, segmentos semelhantes (obtidos com base na distância euclidiana) de dois quadros diferentes são tomados e as pontuações de distância física e dissimilaridade são calculadas. Se as pontuações ultrapassarem um intervalo para cada segmento no quadro anterior, o objeto que está sendo rastreado será considerado como desaparecido.
- Vantagens e desvantagens
As vantagens deste método são usar imagem 2-D e dados 3-D juntos, F l-score (que dá uma medida da precisão do teste), precisão média (AP) são maiores do que quando apenas dados 3-D do lidar são usava. Essas pontuações são medidas convencionais que julgam a estrutura. A desvantagem desse método é o uso do BING para estimativa de propostas de objetos, pois o BING prevê um pequeno conjunto de caixas delimitadoras de objetos.
Detecção de obstáculos e reconhecimento do ambiente rodoviário usando lidar
Este método proposto por Kun Zhou et al. não se concentra apenas na detecção e rastreamento de objetos, mas também reconhece a marcação da pista e os recursos da estrada. Como mencionado anteriormente, os sistemas LIDAR usam espelhos hexagonais rotativos que dividem o feixe de laser em seis feixes. As três camadas superiores são usadas para detectar os objetos à frente, como veículos e objetos à beira da estrada. O sensor é feito de material resistente às intempéries. Os dados detectados pelo lidar são agrupados em vários segmentos e rastreados pelo filtro de Kalman . O agrupamento de dados aqui é feito com base nas características de cada segmento com base no modelo de objeto, que distingue diferentes objetos, como veículos, placas de sinalização, etc. Essas características incluem as dimensões do objeto, etc. Os refletores nas bordas traseiras dos veículos são usados para diferenciar veículos de outros objetos. O rastreamento de objetos é feito usando um filtro Kalman de 2 estágios, considerando a estabilidade do rastreamento e o movimento acelerado dos objetos. A marcação da estrada é detectada usando um método Otsu modificado, distinguindo superfícies ásperas e brilhantes.
- Vantagens
Os refletores de beira de estrada que indicam a borda da pista às vezes ficam ocultos devido a vários motivos. Portanto, outras informações são necessárias para reconhecer a fronteira rodoviária. O lidar usado neste método pode medir a refletividade do objeto. Assim, com esses dados, a fronteira rodoviária também pode ser reconhecida. Além disso, o uso do sensor com cabeça resistente às intempéries ajuda a detectar os objetos mesmo em más condições climáticas. O modelo de altura do dossel antes e depois da enchente é um bom exemplo. O Lidar pode detectar dados de altura do dossel altamente detalhados, bem como a borda da estrada.
As medições do Lidar ajudam a identificar a estrutura espacial do obstáculo. Isso ajuda a distinguir objetos com base no tamanho e estimar o impacto de passar por cima dele.
Os sistemas Lidar oferecem melhor alcance e um grande campo de visão que ajuda a detectar obstáculos nas curvas. Esta é uma grande vantagem sobre os sistemas RADAR que têm um campo de visão mais estreito. A fusão da medição lidar com diferentes sensores torna o sistema robusto e útil em aplicações em tempo real, uma vez que sistemas dependentes de lidar não podem estimar as informações dinâmicas sobre o objeto detectado.
Foi demonstrado que o lidar pode ser manipulado, de modo que os carros autônomos são levados a ações evasivas.
Biologia e conservação

O Lidar também encontrou muitas aplicações na silvicultura . Alturas do dossel , medições de biomassa e área foliar podem ser estudadas usando sistemas LIDAR transportados pelo ar. Da mesma forma, o lidar também é usado por muitos setores, incluindo Energia e Ferrovias, e o Departamento de Transportes como uma forma mais rápida de levantamento. Mapas topográficos também podem ser gerados prontamente a partir do lidar, inclusive para uso recreativo, como na produção de mapas de orientação . O Lidar também foi aplicado para estimar e avaliar a biodiversidade de plantas, fungos e animais.
Além disso, a Save the Redwoods League realizou um projeto para mapear as sequoias altas na costa norte da Califórnia. O Lidar permite que os pesquisadores não apenas meçam a altura de árvores anteriormente não mapeadas, mas também determinem a biodiversidade da floresta de sequoias. Stephen Sillett , que está trabalhando com a Liga no projeto lidar da Costa Norte, afirma que essa tecnologia será útil para direcionar esforços futuros para preservar e proteger antigas sequoias.
Geologia e ciência do solo
Mapas digitais de elevação de alta resolução gerados por LIDAR aerotransportado e estacionário levaram a avanços significativos na geomorfologia (o ramo da geociência preocupado com a origem e evolução da topografia da superfície da Terra). As habilidades do lidar para detectar características topográficas sutis, como terraços de rios e margens de canais de rios, formas de relevo glaciais, para medir a elevação da superfície da terra sob o dossel da vegetação, para resolver melhor as derivações espaciais de elevação e para detectar mudanças de elevação entre pesquisas repetidas permitiram muitos estudos novos dos processos físicos e químicos que moldam as paisagens. Em 2005, o Tour Ronde no maciço do Mont Blanc tornou-se a primeira montanha alpina alta na qual o lidar foi empregado para monitorar a crescente ocorrência de quedas de rocha severas em grandes faces rochosas supostamente causadas por mudanças climáticas e degradação do permafrost em alta altitude.
O Lidar também é usado em geologia estrutural e geofísica como uma combinação entre o lidar aéreo e o GNSS para detecção e estudo de falhas , para medição de elevação . A saída das duas tecnologias pode produzir modelos de elevação extremamente precisos para o terreno – modelos que podem até medir a elevação do solo através de árvores. Esta combinação foi usada mais famosa para encontrar a localização da falha de Seattle em Washington , Estados Unidos. Essa combinação também mede a elevação no Monte St. Helens usando dados de antes e depois da elevação de 2004. Os sistemas LIDAR transportados pelo ar monitoram as geleiras e têm a capacidade de detectar quantidades sutis de crescimento ou declínio. Um sistema baseado em satélite, o NASA ICESat , inclui um subsistema lidar para esta finalidade. O Mapeador Topográfico Aerotransportado da NASA também é usado extensivamente para monitorar geleiras e realizar análises de mudanças costeiras. A combinação também é usada por cientistas do solo ao criar um levantamento do solo . A modelagem detalhada do terreno permite que os cientistas do solo vejam as mudanças de inclinação e quebras de relevo que indicam padrões nas relações espaciais do solo.
Atmosfera
Inicialmente, baseado em lasers de rubi, o lidar para aplicações meteorológicas foi construído logo após a invenção do laser e representa uma das primeiras aplicações da tecnologia laser. Desde então, a tecnologia Lidar se expandiu muito em capacidade e os sistemas lidar são usados para realizar uma série de medições que incluem perfis de nuvens, medição de ventos, estudo de aerossóis e quantificação de vários componentes atmosféricos. Os componentes atmosféricos podem, por sua vez, fornecer informações úteis, incluindo pressão superficial (medindo a absorção de oxigênio ou nitrogênio), emissões de gases de efeito estufa (dióxido de carbono e metano), fotossíntese (dióxido de carbono), incêndios (monóxido de carbono) e umidade (vapor de água). . Os lidars atmosféricos podem ser terrestres, aéreos ou satélites, dependendo do tipo de medição.
O sensoriamento remoto lidar atmosférico funciona de duas maneiras:
- medindo o retroespalhamento da atmosfera, e
- medindo a reflexão espalhada do solo (quando o LIDAR está no ar) ou outra superfície dura.
A retrodifusão da atmosfera fornece diretamente uma medida de nuvens e aerossóis. Outras medições derivadas de retroespalhamento, como ventos ou cristais de gelo cirrus, requerem uma seleção cuidadosa do comprimento de onda e/ou polarização detectada. Doppler lidar e Rayleigh Doppler lidar são usados para medir a temperatura e/ou a velocidade do vento ao longo do feixe, medindo a frequência da luz retroespalhada. O alargamento Doppler de gases em movimento permite a determinação de propriedades através do deslocamento de frequência resultante. Lidars de varredura, como o NASA HARLIE LIDAR, de varredura cônica, foram usados para medir a velocidade do vento atmosférico. A missão eólica ADM-Aeolus da ESA será equipada com um sistema Doppler lidar para fornecer medições globais de perfis verticais de vento. Um sistema Doppler lidar foi usado nos Jogos Olímpicos de Verão de 2008 para medir os campos de vento durante a competição de iates.
Os sistemas Doppler lidar também estão começando a ser aplicados com sucesso no setor de energia renovável para adquirir dados de velocidade do vento, turbulência, desvio do vento e cisalhamento do vento. Ambos os sistemas de onda pulsada e contínua estão sendo usados. Os sistemas pulsados usam a temporização do sinal para obter resolução de distância vertical, enquanto os sistemas de onda contínua dependem do foco do detector.
O termo, eólicas , foi proposto para descrever o estudo colaborativo e interdisciplinar do vento usando simulações computacionais de mecânica de fluidos e medições Doppler lidar.
A reflexão do solo de um LIDAR no ar fornece uma medida da refletividade da superfície (assumindo que a transmitância atmosférica é bem conhecida) no comprimento de onda do LIDAR, no entanto, a reflexão do solo é normalmente usada para fazer medições de absorção da atmosfera. As medições "lidar de absorção diferencial" (DIAL) utilizam dois ou mais comprimentos de onda espaçados (<1 nm) para fatorar a refletividade da superfície, bem como outras perdas de transmissão, uma vez que esses fatores são relativamente insensíveis ao comprimento de onda. Quando ajustado para as linhas de absorção apropriadas de um determinado gás, as medições DIAL podem ser usadas para determinar a concentração (relação de mistura) desse gás específico na atmosfera. Isso é chamado de abordagem de Absorção Diferencial de Caminho Integrado (IPDA), uma vez que é uma medida da absorção integrada ao longo de todo o caminho lidar. Os lidars IPDA podem ser pulsados ou CW e normalmente usam dois ou mais comprimentos de onda. Lidars IPDA têm sido usados para sensoriamento remoto de dióxido de carbono e metano.
O lidar de matriz sintética permite a geração de imagens lidar sem a necessidade de um detector de matriz. Ele pode ser usado para imagens de velocimetria Doppler, imagens de taxa de quadros ultrarrápida (MHz), bem como para redução de speckle em lidar coerente. Uma extensa bibliografia lidar para aplicações atmosféricas e hidrosféricas é fornecida por Grant.
Princípio de Scheimpflug
Outra técnica lidar para sensoriamento remoto atmosférico surgiu. É baseado no princípio de Scheimpflug , conhecido como Scheimpflug lidar ( slidar ).
" A implicação do princípio de Scheimpflug é que quando um feixe de laser é transmitido para a atmosfera, o eco de retrodifusão de todo o volume da sonda de iluminação ainda está em foco simultaneamente sem diminuir a abertura, desde que o plano do objeto, o plano da imagem e o plano da lente se cruzam ". Uma câmera CCD/CMOS bidimensional é usada para resolver o eco de retrodifusão do feixe de laser transmitido.
Assim, como no caso das tecnologias lidar convencionais, fontes de luz de onda contínua, como lasers de diodo, podem ser empregadas para sensoriamento remoto em vez de usar fontes complicadas de luz de pulso de nanossegundos. O sistema SLidar também é um sistema robusto e barato baseado em diodos laser compactos e detectores de matriz. Um sistema NO 2 DIAL de onda contínua (CW) baseado no princípio de Scheimpflug foi desenvolvido empregando um diodo laser multimodo CW de 450 nm compacto de alta potência como fonte de luz. As emissões de laser nos comprimentos de onda on-line e off-line do espectro de absorção de NO 2 são implementadas ajustando a corrente de injeção do diodo laser. Os sinais do Lidar são detectados por um sensor de imagem CCD de área inclinada de 45° que atende ao princípio de Scheimpflug. Concentrações de NO 2 resolvidas em um caminho quase horizontal são obtidas pelo sistema NO 2 DIAL na faixa de 0,3 a 3 km e mostram boa concordância com aquelas medidas por uma estação convencional de monitoramento de poluição do ar. Uma sensibilidade de detecção de ± 0,9 ppbv com nível de confiança de 95% na região de 0,3 a 1 km é alcançada com média de 15 minutos e resolução de alcance de 700 m durante as horas de escuridão, o que permite a medição precisa da concentração de NO 2 ambiente . O sistema DIAL robusto e de baixo custo demonstrado neste trabalho abre muitas possibilidades para aplicações de sensoriamento remoto de NO 2 em campo.
Aplicação da lei
As armas de velocidade Lidar são usadas pela polícia para medir a velocidade dos veículos para fins de fiscalização do limite de velocidade . Além disso, é usado em forense para auxiliar nas investigações da cena do crime. As varreduras de uma cena são feitas para registrar detalhes exatos da localização do objeto, sangue e outras informações importantes para revisão posterior. Essas varreduras também podem ser usadas para determinar a trajetória da bala em casos de tiroteios.
Militares
Sabe-se que poucas aplicações militares estão em vigor e são classificadas (como a medição de velocidade baseada em lidar do míssil de cruzeiro nuclear furtivo AGM-129 ACM ), mas uma quantidade considerável de pesquisas está em andamento em seu uso para imagens. Sistemas de resolução mais alta coletam detalhes suficientes para identificar alvos, como tanques . Exemplos de aplicações militares do lidar incluem o Airborne Laser Mine Detection System (ALMDS) para guerra contra minas da Areté Associates.
Um relatório da OTAN (RTO-TR-SET-098) avaliou as tecnologias potenciais para fazer a detecção stand-off para a discriminação de agentes de guerra biológica. As tecnologias potenciais avaliadas foram Infravermelho de Onda Longa (LWIR), Dispersão Diferencial (DISC) e Fluorescência Induzida por Laser Ultravioleta (UV-LIF). O relatório concluiu que: Com base nos resultados dos sistemas lidar testados e discutidos acima, o Grupo de Tarefas recomenda que a melhor opção para a aplicação de curto prazo (2008–2010) de sistemas de detecção de afastamento seja UV-LIF , no entanto, a longo prazo, outras técnicas como a espectroscopia Raman stand-off podem revelar-se úteis para a identificação de agentes de guerra biológica.
O lidar espectrométrico compacto de curto alcance baseado em fluorescência induzida por laser (LIF) abordaria a presença de ameaças biológicas na forma de aerossol em locais críticos internos, semifechados e externos, como estádios, metrôs e aeroportos. Essa capacidade quase em tempo real permitiria a detecção rápida de uma liberação de bioaerossol e permitiria a implementação oportuna de medidas para proteger os ocupantes e minimizar a extensão da contaminação.
O Long-Range Biological Standoff Detection System (LR-BSDS) foi desenvolvido para o Exército dos EUA para fornecer o mais rápido possível aviso de afastamento de um ataque biológico. É um sistema aéreo transportado por helicóptero para detectar nuvens de aerossóis sintéticos contendo agentes biológicos e químicos a longa distância. O LR-BSDS, com alcance de detecção de 30 km ou mais, foi colocado em campo em junho de 1997. Cinco unidades lidar produzidas pela empresa alemã Sick AG foram usadas para detecção de curto alcance em Stanley , o carro autônomo que venceu o DARPA Grand Challenge 2005 .
Um Boeing robótico AH-6 realizou um voo totalmente autônomo em junho de 2010, inclusive evitando obstáculos usando lidar.
Mineração
Para o cálculo dos volumes de minério é realizado o escaneamento periódico (mensal) nas áreas de retirada do minério, comparando os dados da superfície com o escaneamento anterior.
Os sensores Lidar também podem ser usados para detecção e prevenção de obstáculos para veículos robóticos de mineração, como no Komatsu Autonomous Haulage System (AHS) usado na Mina do Futuro da Rio Tinto.
Física e astronomia
Uma rede mundial de observatórios usa lidars para medir a distância de refletores colocados na lua , permitindo que a posição da lua seja medida com precisão milimétrica e testes de relatividade geral sejam feitos. MOLA , o Mars Orbiting Laser Altimeter, usou um instrumento LIDAR em um satélite em órbita de Marte (o Mars Global Surveyor da NASA ) para produzir um levantamento topográfico global espetacularmente preciso do planeta vermelho. Os altímetros a laser produziram modelos de elevação global de Marte, a Lua (Lunar Orbiter Laser Altimeter (LOLA)), Mercúrio (Mercury Laser Altimeter (MLA)), NEAR-Shoemaker Laser Rangefinder (NLR). As missões futuras também incluirão experimentos com altímetro a laser, como o Ganymede Laser Altimeter (GALA) como parte da missão Jupiter Icy Moons Explorer (JUICE).
Em setembro de 2008, a NASA Phoenix Lander usou lidar para detectar neve na atmosfera de Marte.
Na física atmosférica, o lidar é usado como um instrumento de detecção remota para medir densidades de certos constituintes da atmosfera média e alta, como potássio , sódio ou nitrogênio molecular e oxigênio . Essas medições podem ser usadas para calcular temperaturas. O Lidar também pode ser usado para medir a velocidade do vento e fornecer informações sobre a distribuição vertical das partículas de aerossol .
Na instalação de pesquisa de fusão nuclear JET , no Reino Unido, perto de Abingdon, Oxfordshire , o espalhamento lidar Thomson é usado para determinar os perfis de densidade eletrônica e temperatura do plasma .
Mecânica das rochas
O Lidar tem sido amplamente utilizado na mecânica das rochas para caracterização de maciços rochosos e detecção de mudanças de inclinação. Algumas propriedades geomecânicas importantes do maciço rochoso podem ser extraídas das nuvens de pontos 3-D obtidas por meio do LIDAR. Algumas dessas propriedades são:
- Orientação de descontinuidade
- Espaçamento de descontinuidade e RQD
- Abertura de descontinuidade
- Persistência de descontinuidade
- Rugosidade de descontinuidade
- Infiltração de água
Algumas dessas propriedades têm sido utilizadas para avaliar a qualidade geomecânica do maciço rochoso através do índice RMR . Além disso, como as orientações das descontinuidades podem ser extraídas usando as metodologias existentes, é possível avaliar a qualidade geomecânica de um talude rochoso através do índice SMR . Além disso, a comparação de diferentes nuvens de pontos 3D de um talude adquirido em diferentes momentos permite aos pesquisadores estudar as mudanças produzidas na cena durante esse intervalo de tempo como resultado de desmoronamentos ou quaisquer outros processos de deslizamento.
THOR
THOR é um laser projetado para medir as condições atmosféricas da Terra. O laser entra em uma cobertura de nuvens e mede a espessura do halo de retorno. O sensor possui uma abertura de fibra óptica com largura de 7,5 polegadas que é usada para medir a luz de retorno.
Robótica
A tecnologia Lidar está sendo usada em robótica para a percepção do ambiente e classificação de objetos. A capacidade da tecnologia lidar de fornecer mapas de elevação tridimensionais do terreno, distância de alta precisão ao solo e velocidade de aproximação pode permitir o pouso seguro de veículos robóticos e tripulados com alto grau de precisão. Os Lidar também são amplamente utilizados em robótica para localização e mapeamento simultâneos e bem integrados em simuladores de robôs. Consulte a seção Militar acima para mais exemplos.
Voo espacial
O Lidar está sendo cada vez mais utilizado para telemetria e cálculo de elementos orbitais de velocidade relativa em operações de proximidade e manutenção de estações de espaçonaves . Lidar também tem sido usado para estudos atmosféricos do espaço. Pulsos curtos de luz laser emitidos por uma espaçonave podem refletir partículas minúsculas na atmosfera e voltar para um telescópio alinhado com o laser da espaçonave. Ao cronometrar com precisão o 'eco' do lidar e medir a quantidade de luz laser recebida pelo telescópio, os cientistas podem determinar com precisão a localização, a distribuição e a natureza das partículas. O resultado é uma nova ferramenta revolucionária para estudar os constituintes da atmosfera, desde gotículas de nuvens a poluentes industriais, que são difíceis de detectar por outros meios."
A altimetria a laser é usada para fazer mapas digitais de elevação de planetas, incluindo o mapeamento do Mars Orbital Laser Altimeter (MOLA) de Marte, o Lunar Orbital Laser Altimeter (LOLA) e o mapeamento do Lunar Altimeter (LALT) da Lua e o Mercury Laser Altimeter ( MLA) mapeamento de Mercúrio. Ele também é usado para ajudar a navegar o helicóptero Ingenuity em seus voos recordes sobre o terreno de Marte .
Agrimensura

Os sensores lidar no ar são usados por empresas no campo de sensoriamento remoto. Eles podem ser usados para criar um DTM (Digital Terrain Model) ou DEM ( Digital Elevation Model ); esta é uma prática bastante comum para áreas maiores, pois um avião pode adquirir faixas de 3 a 4 km de largura em um único sobrevoo. Maior precisão vertical abaixo de 50 mm pode ser alcançada com um viaduto mais baixo, mesmo em florestas, onde é capaz de fornecer a altura do dossel, bem como a elevação do solo. Normalmente, é necessário um receptor GNSS configurado sobre um ponto de controle georreferenciado para vincular os dados ao WGS ( World Geodetic System ).
LiDAR também está em uso em levantamentos hidrográficos . Dependendo da clareza da água, o LiDAR pode medir profundidades de 0,9 m a 40 m com precisão vertical de 15 cm e precisão horizontal de 2,5 m.
Silvicultura
Os sistemas Lidar também foram aplicados para melhorar o manejo florestal. As medições são usadas para fazer o inventário em parcelas florestais, bem como calcular as alturas individuais das árvores, a largura da copa e o diâmetro da copa. Outras análises estatísticas usam dados do lidar para estimar informações totais da parcela, como volume do dossel, alturas médias, mínimas e máximas e estimativas de cobertura vegetal. O Aerial LiDAR foi usado para mapear os incêndios florestais na Austrália no início de 2020. Os dados foram manipulados para visualizar a terra nua e identificar vegetação saudável e queimada.
Transporte

O Lidar tem sido usado no setor ferroviário para gerar relatórios de saúde de ativos para gerenciamento de ativos e por departamentos de transporte para avaliar suas condições rodoviárias. CivilMaps.com é uma empresa líder na área. O Lidar tem sido usado em sistemas de controle de cruzeiro adaptativo (ACC) para automóveis. Sistemas como os da Siemens, Hella, Ouster e Cepton usam um dispositivo lidar montado na frente do veículo, como o para-choque, para monitorar a distância entre o veículo e qualquer veículo à sua frente. Caso o veículo da frente abrande ou esteja muito próximo, o ACC aciona os freios para desacelerar o veículo. Quando a estrada à frente está livre, o ACC permite que o veículo acelere até uma velocidade predefinida pelo motorista. Consulte a seção Militar acima para mais exemplos. Um dispositivo baseado em lidar, o Ceilometer é usado em aeroportos em todo o mundo para medir a altura das nuvens nos caminhos de aproximação da pista.
Otimização de parques eólicos
O Lidar pode ser usado para aumentar a produção de energia dos parques eólicos medindo com precisão a velocidade do vento e a turbulência do vento. Os sistemas LIDAR experimentais podem ser montados na nacele de uma turbina eólica ou integrados ao spinner giratório para medir ventos horizontais que se aproximam, ventos na esteira da turbina eólica e ajustar proativamente as pás para proteger os componentes e aumentar a potência. O Lidar também é usado para caracterizar o recurso eólico incidente para comparação com a produção de energia da turbina eólica para verificar o desempenho da turbina eólica medindo a curva de potência da turbina eólica. A otimização de parques eólicos pode ser considerada um tópico em eólica aplicada . Outro aspecto do Lidar na indústria relacionada ao vento é usar a dinâmica computacional de fluidos sobre superfícies escaneadas pelo Lidar para avaliar o potencial do vento, que pode ser usado para a localização ideal dos parques eólicos.
Otimização da implantação solar fotovoltaica
O Lidar também pode ser usado para auxiliar os planejadores e desenvolvedores na otimização de sistemas solares fotovoltaicos no nível da cidade, determinando os telhados apropriados e as perdas de sombreamento . Esforços recentes de varredura a laser no ar se concentraram em maneiras de estimar a quantidade de luz solar que atinge as fachadas verticais dos edifícios ou incorporando perdas de sombreamento mais detalhadas, considerando a influência da vegetação e do terreno circundante maior.
Videogames
Jogos de corrida de simulação recentes, como rFactor Pro , iRacing , Assetto Corsa e Project CARS, apresentam cada vez mais pistas de corrida reproduzidas de nuvens de pontos 3-D adquiridas por meio de pesquisas Lidar, resultando em superfícies replicadas com precisão de centímetros ou milímetros no ambiente 3-D do jogo .
O jogo de exploração de 2017 Scanner Sombre , da Introversion Software , usa o Lidar como uma mecânica de jogo fundamental.
Em Build the Earth , o Lidar é usado para criar renderizações precisas de terreno no Minecraft para contabilizar quaisquer erros (principalmente em relação à elevação) na geração padrão. O processo de renderização do terreno no Build the Earth é limitado pela quantidade de dados disponíveis na região, bem como pela velocidade necessária para converter o arquivo em dados de bloco.
Outros usos

Acredita-se que o vídeo da música de 2007 " House of Cards " do Radiohead foi o primeiro uso de varredura a laser 3-D em tempo real para gravar um videoclipe. Os dados de alcance no vídeo não são completamente de um lidar, pois a varredura de luz estruturada também é usada.
Em 2020, a Apple apresentou a quarta geração do iPad Pro com um sensor lidar integrado ao módulo da câmera traseira , desenvolvido especialmente para experiências de realidade aumentada (AR). O recurso foi posteriormente incluído no iPhone 12 Pro e iPhone 12 Pro Max e no iPhone 13 Pro e iPhone 13 Pro Max .
Tecnologias alternativas
O desenvolvimento recente das tecnologias Structure From Motion (SFM) permite fornecer imagens e mapas 3-D com base em dados extraídos de fotografia visual e IR. Os dados de elevação ou 3D são extraídos usando várias passagens paralelas sobre a área mapeada, produzindo imagens de luz visual e estrutura 3D do mesmo sensor, que geralmente é uma câmera digital especialmente escolhida e calibrada .
A visão estéreo por computador mostrou-se promissora como alternativa ao LiDAR para aplicações de curto alcance.
Veja também
- Filtro de linha atômica - filtro passa-banda óptico usado nas ciências físicas
- Ceilometer – Lidar baseado no solo para medição de altura de nuvem
- Turbulência ao ar livre – Movimento turbulento de massas de ar transparentes sem quaisquer pistas visuais
- CLIdar
- Geodimetro
- Medição de estrutura geológica por LiDAR – Medição de terreno com feixes de luz
- Telémetro a laser - Um dispositivo de alcance que usa um feixe de laser para determinar a distância de um objeto
- Formato de arquivo LAS
- libLAS – biblioteca C++ licenciada pelo BSD para leitura/gravação de dados ASPRS LAS lidar
- Detector Lidar
- Lista de artigos sobre laser – artigo da lista da Wikipedia
- Conjunto de dados lidar nacional (todos os países)
- Conjunto de dados nacional do Lidar (Estados Unidos)
- Optech
- Detecção óptica heteródino
- Reflectômetro óptico no domínio do tempo
- Fotogrametria – Fazer medições usando fotografia
- Imagem de alcance – Técnica que produz uma imagem 2D mostrando a distância a pontos em uma cena a partir de um ponto específico.
- Alcance a laser de satélite
- Mapeamento do fundo do mar#LiDAR
- refrigerante
- Reflectometria no domínio do tempo
- TopoFlight
Referências
Leitura adicional
- Gil, Emílio; Llorens, Jordi; Llop, Jordi; Fàbregas, Xavier; Gallart, Montserrat (2013). " Uso de um Sensor Terrestre LIDAR para Detecção de Deriva na Pulverização de Vinhas ". Sensores . 13 (1): 516-534. doi : 10.3390/s130100516. ISSN 1424-8220. PMC 3574688. PMID 23282583.
- Património, E. (2011). Digitalização a laser 3D para patrimônio. Aconselhamento e orientação aos usuários sobre escaneamento a laser em arqueologia e arquitetura. Disponível em www.english-heritage.org.uk. Digitalização a Laser 3D para Patrimônio | Inglaterra histórica
- Heritage, G., & Large, A. (Eds.). (2009). Escaneamento a laser para as ciências ambientais. John Wiley & Filhos. ISBN 1-4051-5717-8
- Maltamo, M., Næsset, E., & Vauhkonen, J. (2014). Aplicações Florestais de Varredura a Laser Aerotransportada: Conceitos e Estudos de Caso (Vol. 27). Springer Science & Business Media. ISBN 94-017-8662-3
- Shan, J., & Toth, CK (Eds.). (2008). Varredura e varredura topográfica a laser: princípios e processamento. Imprensa CRC. ISBN 1-4200-5142-3
- Vosselman, G., & Maas, HG (Eds.). (2010). Varredura a laser aérea e terrestre. Editora Whittles. ISBN 1-4398-2798-2
links externos
- Administração Nacional Oceânica e Atmosférica (NOAA) (15 de abril de 2020). "O que é LIDAR?" . Serviço Nacional do Oceano da NOAA .
- O USGS Center for LIDAR Information Coordination and Knowledge (CLICK) – Um site destinado a "facilitar o acesso a dados, coordenação de usuários e educação de sensoriamento remoto lidar para necessidades científicas".
- Visualizador de dados lidar on-line gratuito
- Notícias e educação do setor Lidar